SaltForTheThirsty
AnetA8Drill()
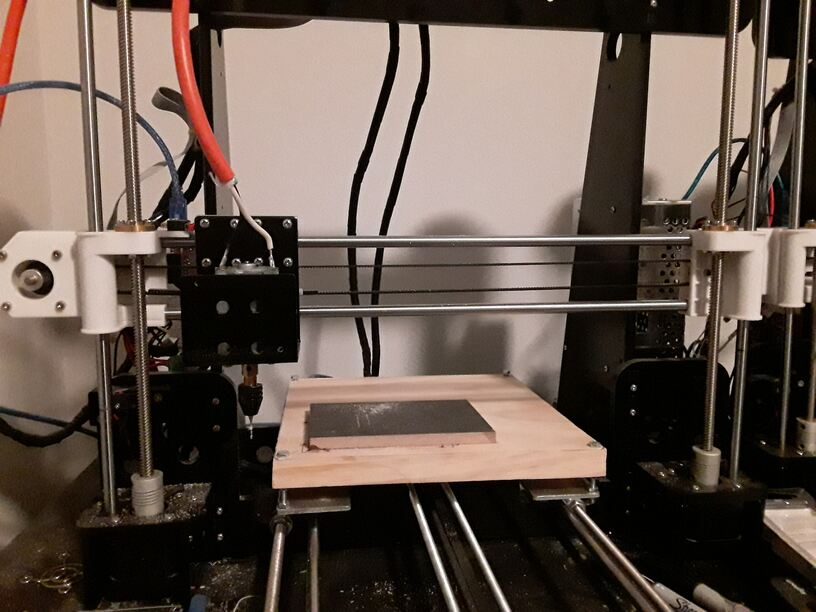
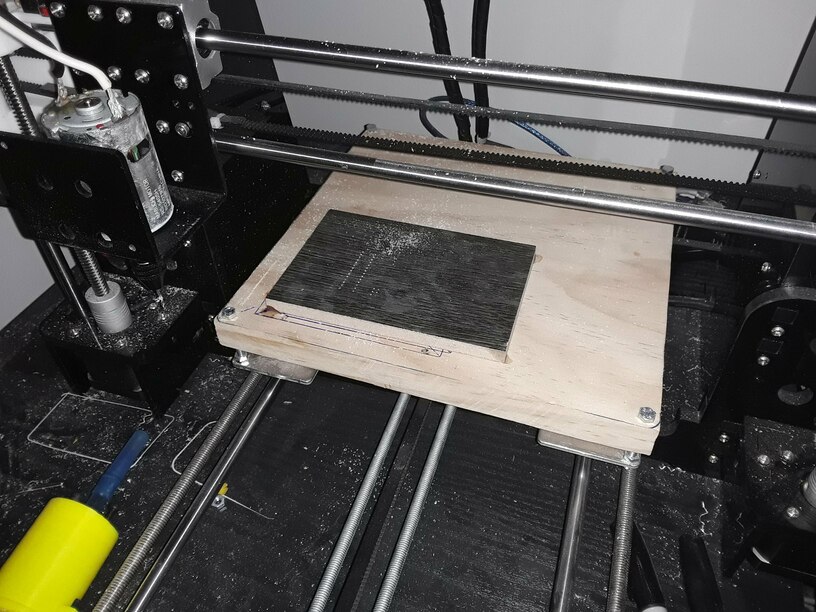
Converted my Anet A8 to a CNC so I can drill PCBs. Hardware conversion was simple. I removed the hotend, associated fans, and hardware. I then drilled a hole big enough for the end of a RS-540 motor to go into and two holes for the motor mounting screws. I put a chuck on the end of the motor and I powered it up with a bench top power supply. I'm using Klipper firmware in my A8. This firmware doesn't work with the gcode generated by pcb2gcode so I wrote some software to convert it to gcode the firmware can work with.
AnetA8Drill:
Download Files.
#include <stdio.h>
void downUp(float, float, float, float);
int main(int argc, char **argv){
const float PCB_BLANK_X = 101.6; // size of pcb
const float PCB_BLANK_Y = 76.2; // size of pcb
const float BOARD_SIZE_X = 63.0; // size of board outline
const float BOARD_SIZE_Y = 61.0; // size of board outline
const float INITIAL_XOFFSET = 4.0; // how far the board is from the drills x = 0 coordinate
const float INITIAL_YOFFSET = 24.0; // how far the board is from the drills y = 0 coordinate
const float XYSPEED = 4800.0;
const float ZSPEED = 100.0;
const float ZDOWN = -5.0 ;
const float ZUP = 5.0;
const float INITIAL_ZOFFSET = 11.0;
const float BITLENGTHBELOW = 15.0;
const float ZSAFETYLENGTH = 2.0;
const float FINAL_Z_OFFSET = INITIAL_ZOFFSET + BITLENGTHBELOW + ZSAFETYLENGTH;
float finalXoffset, finalYoffset, centerX, centerY;
centerX = (PCB_BLANK_X/2.0) + INITIAL_XOFFSET ;
centerY = (PCB_BLANK_Y/2.0) + INITIAL_YOFFSET;
finalXoffset = centerX - (BOARD_SIZE_X/2.0);
finalYoffset = centerY - (BOARD_SIZE_Y/2.0);
int c, d;
d = 'a'; // initialize to something other than '\n' or EOF
// preamble
printf("; centerX = %f\tcenterY = %f\n", centerX, centerY);
printf("; finalXoffset = %f,\tfinalYoffset = %f\n", finalXoffset, finalYoffset);
printf("G21 ;metric values\n"
"G90 ;absolute positioning\n"
"M107 ;start with the fan off\n"
"G28 X0 Y0 ;move X/Y to min endstops\n"
"G28 Z0 ;move Z to min endstops\n"
"G1 Z15.0 F9000 ;move the platform down 15mm\n"
"G1 F9000\n"
// Put printing message on LCD screen
"M117Drilling...\n"
"G92 E0\n"
"G1 F%f\n"
"M107\n"
"G1 Z%f\n"
"G1 X%f Y%f\n"
"G1 Z%f\n"
"G92 X0 Y0 Z0\n"
// "M206 X%f\n"
// "M206 Y%f\n"
/*"M206 Z%f\n" */, XYSPEED,FINAL_Z_OFFSET*2.0, finalXoffset, finalYoffset, FINAL_Z_OFFSET);
printf("\n\n");
printf("G1 ");
c = getchar();
while(!(d == '\n' && c == EOF)){
if(c != '\n'){
putchar(c);
}
else{
putchar(c);
downUp(ZDOWN, ZUP, ZSPEED, XYSPEED);
}
d = c;
c = getchar();
}
printf("G28 X0 Y0 Z0\n");
return 0;
}
void downUp(float downPosition, float upPosition, float zSpeed, float xySpeed){
printf("G1 Z%f F%f\n",downPosition, zSpeed);
printf("G1 Z%f F%f\n",upPosition, xySpeed);
printf("G1 F%f", xySpeed);
}